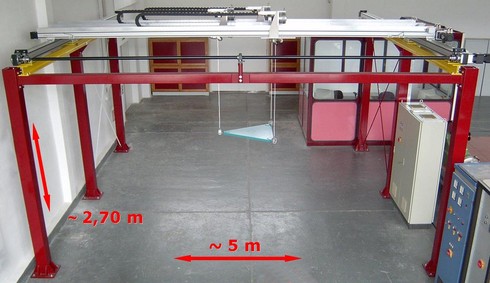
Laboratory System CABLEV (CABle LEVitation)
(rope-guided handling system)
Experimental validation of control concepts
Flatness-based feedforward control (non-linear) and linear state feedback
Position measurement of the platform using inertial sensors
Moving payloads in space using multiple cables with independently controllable cable winches
Combining the advantages of robots and cranes:
+ Up to six degrees of freedom of movement
+ Guiding along desired spatial movement paths
+ High positioning accuracy
+ Large payloads
+ Large workspace
Kinematically indeterminate load guidance leads to load oscillations
+ Stabilization through closed-loop control