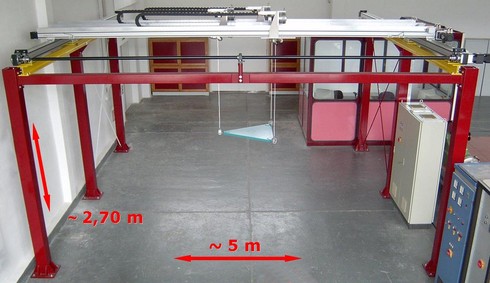
Laborsystem CABLEV (CABle LEVitation)
(Seilgeführtes Handhabungssystem)
Experimentelle Validierung von Regelungskonzepten
Flachheitsbasierte Feedforward-Steuerung (nichtlinear) und lineare Zustandsrückführung
Lagemessung der Plattform durch Inertial-Sensoren
Bewegen von Nutzlasten im Raum durch mehrere Seile mit unabhängig voneinander steuerbaren Seilwinden
Verbindung der Vorteile von Robotern und Kranen:
+ bis zu sechs Bewegungsfreiheitsgrade
+ Führen entlang gewünschter räumlicher Bewegungsbahnen
+ hohe Positioniergenauigkeit
+ große Nutzlasten
+ großer Arbeitsraum
Kinematisch unbestimmte Lastführung führt zu Lastpendelschwingungen
+ Stabilisierung durch Regelung