C++ Class Library Mobile
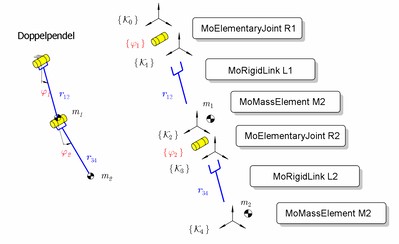
In addition to commercial multibody simulation software, the Chair of Engineering Mechanics/Dynamics also uses the object-oriented C++ class library MOBILE. In this framework, all components of the mechanical system are represented as objects in a kinematic chain using the method of kinetostatic transmission elements. The resulting models, including their visualization, are compiled into standalone executable programs. The software was developed by Prof. A. Kecskeméthy of the University of Duisburg-Essen. A major advantage for research and development is the open programming environment, which allows for the implementation of custom transmission elements. The C++ class library MOBILE is especially well-suited for the development of controllers with mechanical control plants.