Flexible Multibody Systems
Students will gain an understanding of the fundamental concepts for modeling and numerical simulation of flexible multibody systems. Through accompanying exercises, they will learn to develop problem-specific simulation models and to physically interpret and assess the simulation results.
Content:
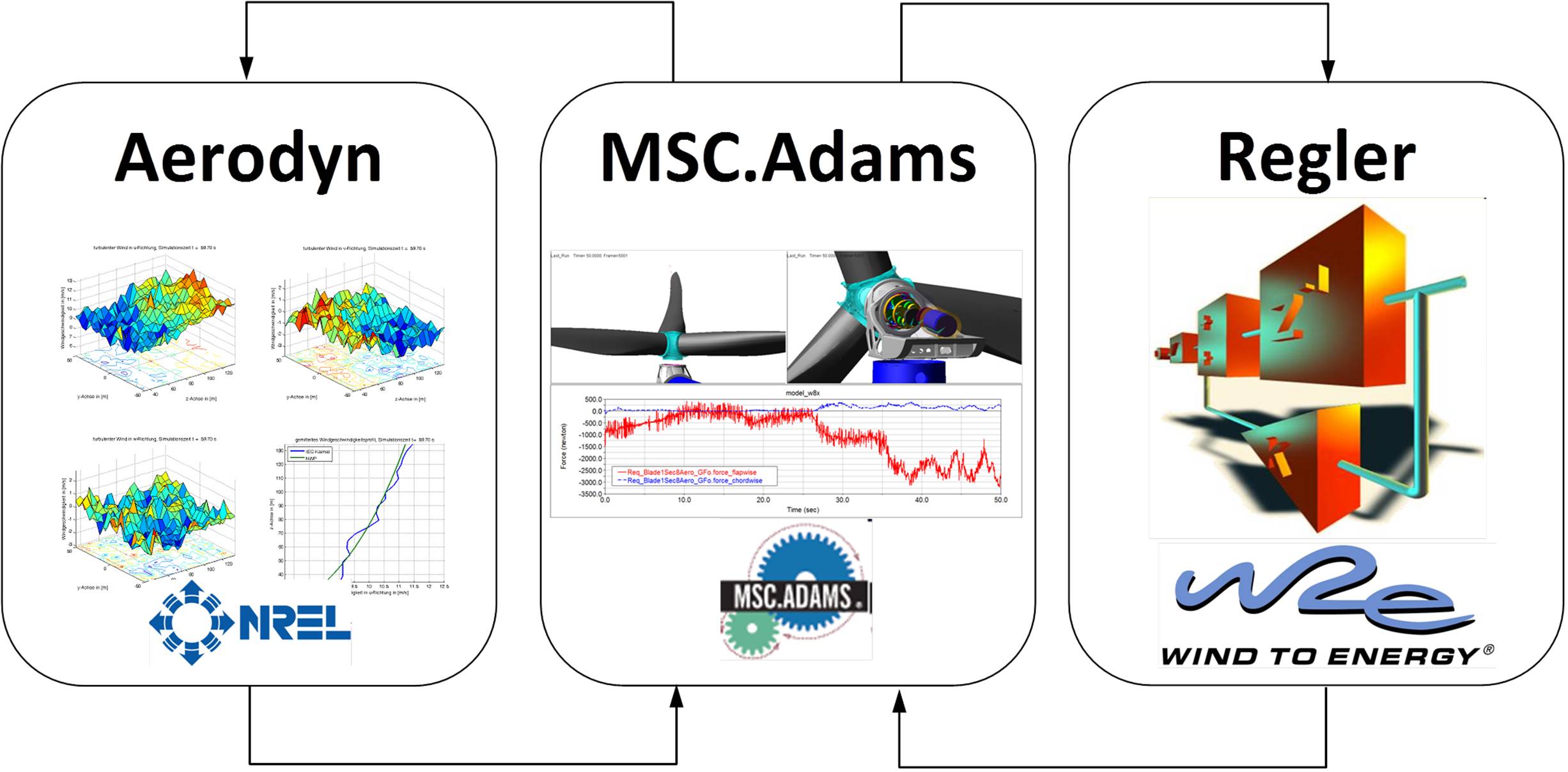
Flexible multibody systems are used to analyze machines, robots, vehicles, and other mechanical systems in which large nonlinear motions are accompanied by elastic deformations of the bodies. Examples include robots with flexible arms, high-speed mechanisms, or wind turbines.
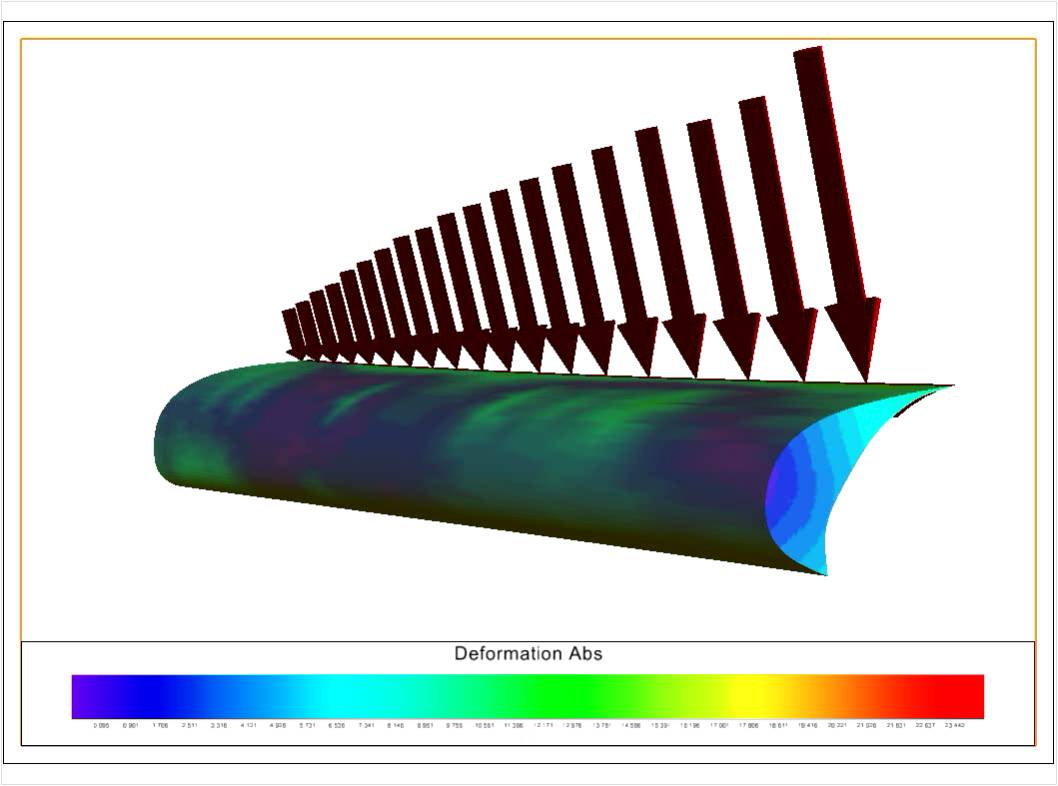
Kinematics of a flexible body
Shape functions for describing elastic deformations
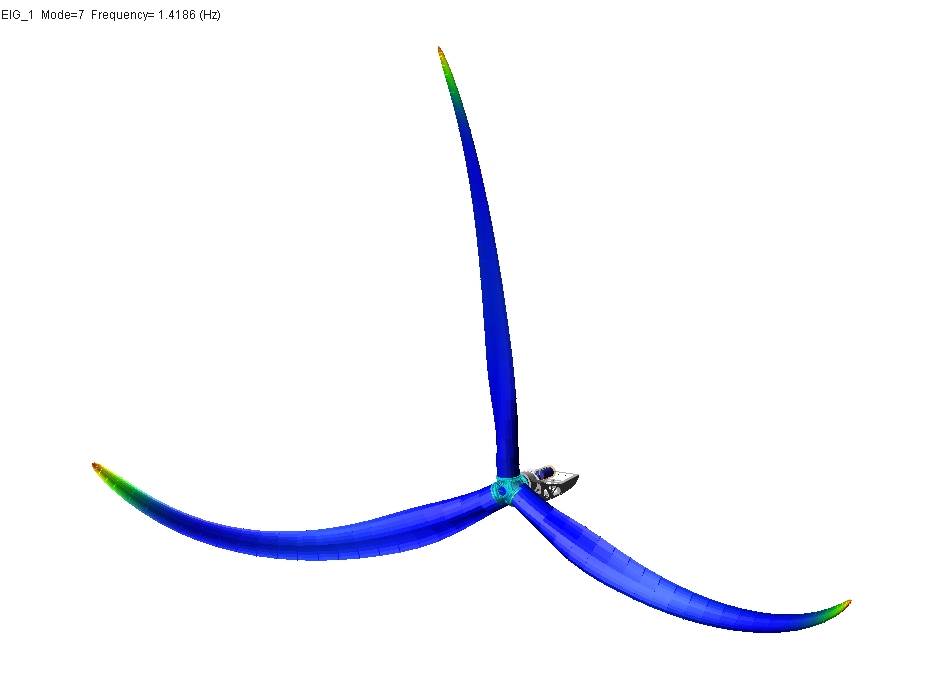
Equations of motion for a flexible body
Approaches for integrating flexible bodies into multibody systems
Exercises will be solved using MBS simulation software such as ADAMS or SIMPACK.
