Elastische Mehrkörpersysteme
Die Studierenden lernen die grundlegenden Konzepte zur Modellierung und Qualifikationsziele: Numerik elastischer Mehrkörpersysteme verstehen. In Verbindung mit den Übungen lernen sie, problemangepasste Simulationsmodelle aufzubauen und Simulations- ergebnisse physikalisch zu interpretieren und zu beurteilen.
Inhalt:
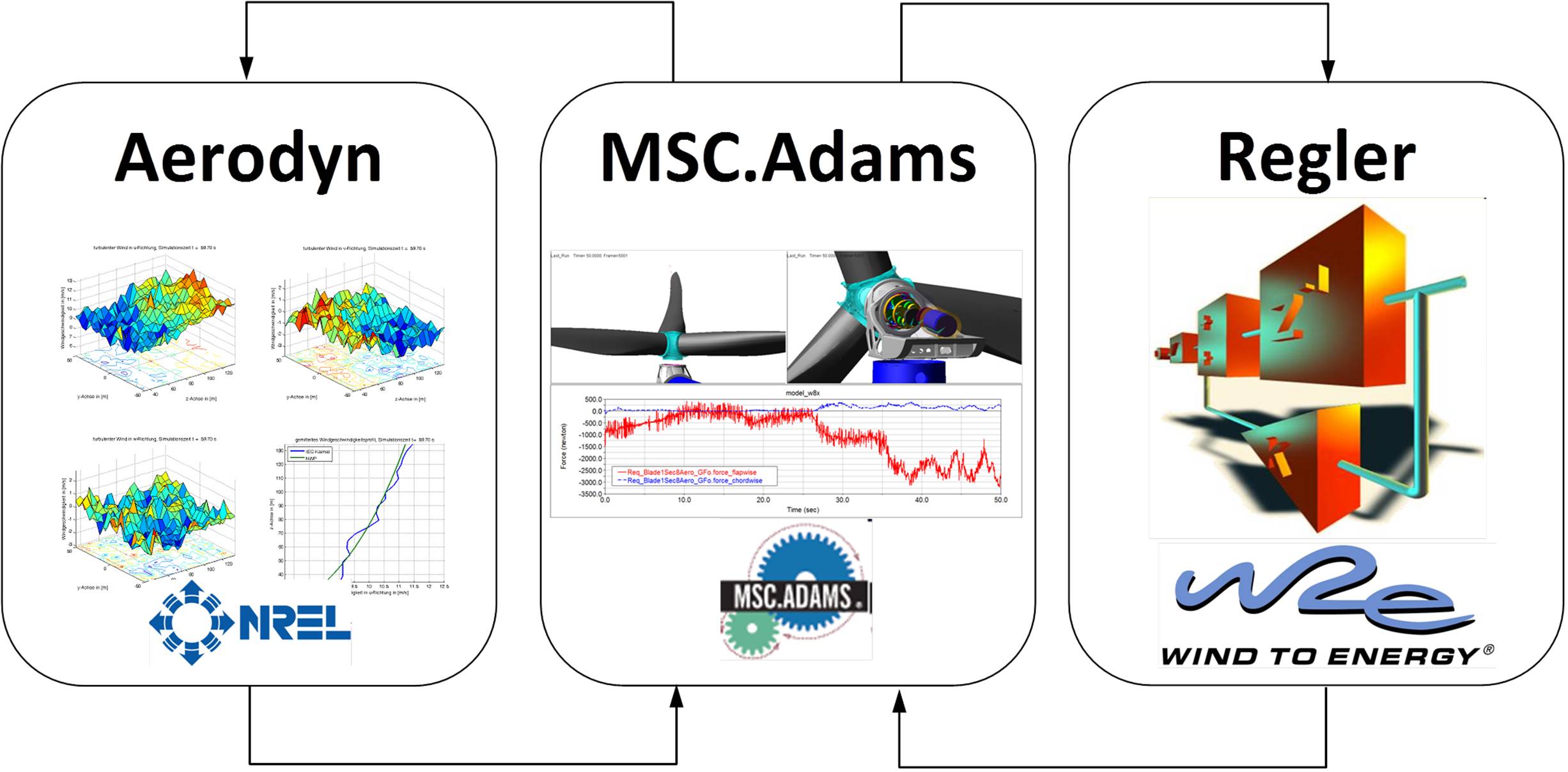
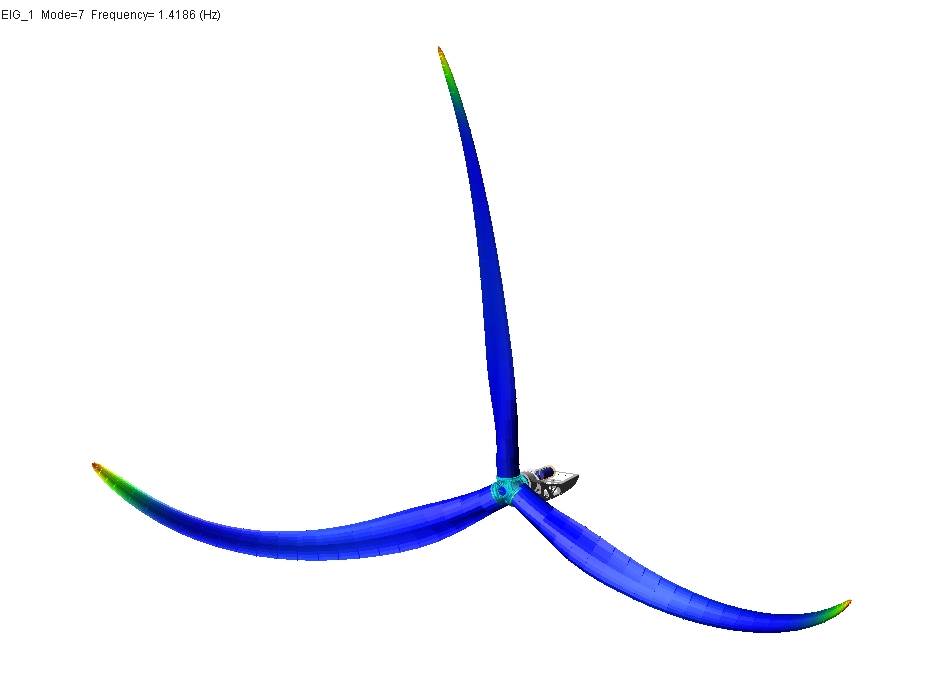
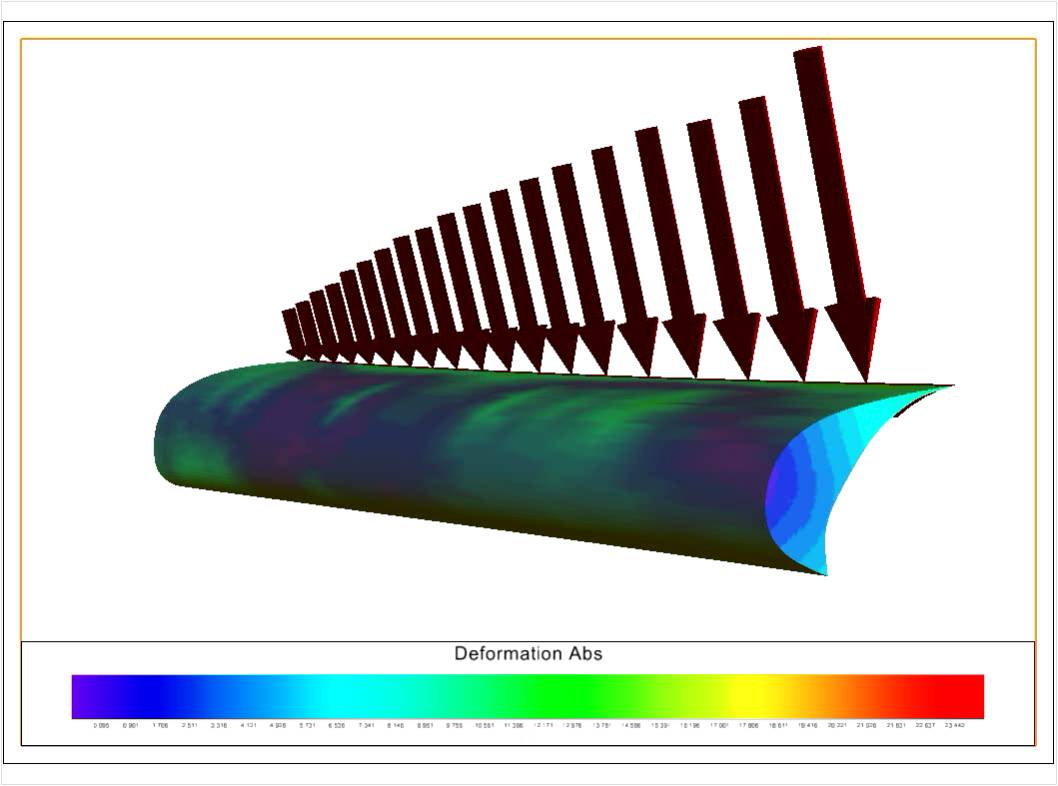
Mit Hilfe der elastischen Mehrkörpersysteme können Maschinen, Roboter, Fahrzeuge und andere mechanische Systeme untersucht werden, bei denen neben großen nichtlinearen Arbeitsbewegungen auch elastische Verformungen der Körper auftreten. Beispiele sind Roboter mit elastischen Armen, schnelllaufende Mechanismen oder Windenergieanlagen.
1. Kinematik eines elastischen Körpers
2. Ansatzfunktionen zur Beschreibung elastischer Verformungen
3. Bewegungsgleichungen eines elastischen Körpers
4. Ansätze zur Einbindung elastischer Körper in Mehrkörpersysteme
Übungsaufgaben werden mit Hilfe des MKS-Simulationsprogramms ADAMS bzw. SIMPACK gelöst.

Vorlesungsunterlagen können unter Stud.IP heruntergeladen werden.
Auf einen Blick
Studiengänge
- M.Sc. Maschinenbau
- M.Sc. Biomedizinische Technik
Lehrende
- Dr.-Ing.habil. János Zierath
- Dipl.-Ing. Roman Rachholz
Umfang 3 SWS V, 1 SWS Ü, 1 SWS P
Leistungspunkte 6
Zeitraum
Sommersemester
Literatur
Das Buch "Christoph Woernle - Mehrkörpersysteme" können Sie auf Springerlink unter folgender Adresse einsehen und herunterladen:
