
According to the German Federal Statistical Office, 227.293 hip joint and 173.304 knee joint replacements as well as 22.406 initial implantations of endoprosthetic joints in the upper extremity (shoulder, elbow, hand and finger joint) were performed in Germany in 2015. In addition, there were 35.290 (hip), 24.747 (knee) and 3.666 (upper extremity) revision operations following an endoprosthetic joint replacement, meaning that more than 1.300 operations were carried out nationwide every day in 2015 in connection with an artificial replacement of the joints listed.
In its 2016 annual report, the NJR (National Joint Registry for England, Wales, Northern Ireland and the Isle of Man) lists joint instability and dislocation (13% (hip), 19.2% (knee) and 27% (shoulder)), incorrect positioning of the implant components (5.3% (hip) and 7.4% (knee)) and a restricted range of motion in the artificial knee joint (5.3%) as reasons for replacement operations.
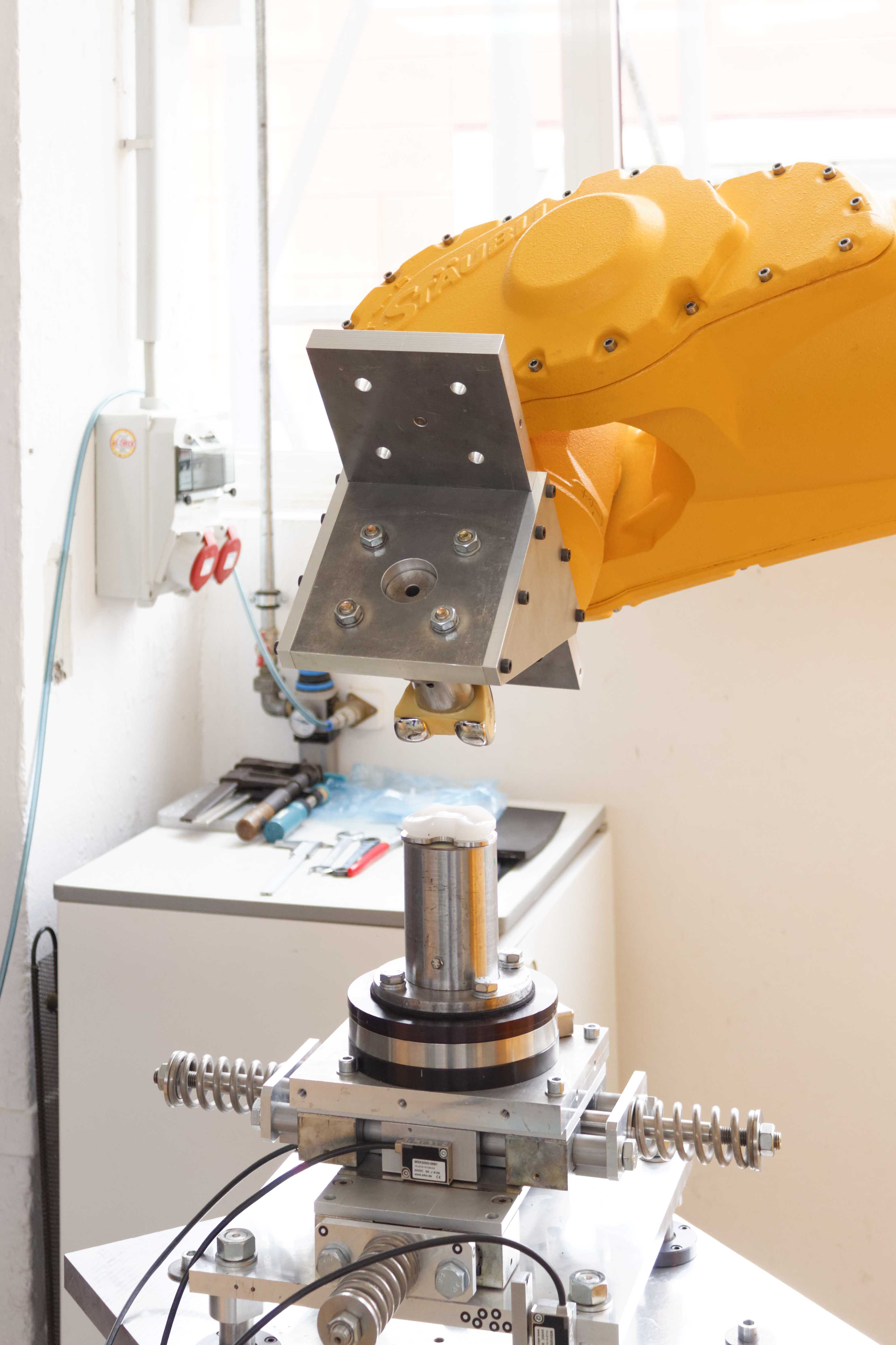
In order to be able to reproducibly and systematically investigate the influencing factors of joint instability, the effects of incorrect positioning and different implant designs on joint kinematics under realistic conditions, the Chair of Technical Mechanics/Dynamics, in collaboration with FORBIOMIT (Research Laboratory for Biomechanics and Implant Technology at Rostock University Medical Center), has developed a robot-based hardware-in-the-loop (HiL) joint simulator.
A real endoprosthesis is moved and loaded by an industrial robot (Stäubli TX200) equipped with a force-torque sensor (ATI Omega 160) in interaction with a biomechanical simulation model of the anatomical environment of the joint. For this purpose, the six spatial degrees of freedom of the joint are divided complementarily into free and locked directions. In the free direction(s), the endoprosthesis is moved by the robot in a position-controlled manner and in the locked directions in a force-torque-controlled manner.
This joint simulator has been used in several research projects to successfully test artificial hip and knee endoprostheses. Some of the results on artificial hip joints have been published, for example, in Herrmann et al. 2015 and Geier et al. 2017 and on artificial knee joints, for example, in Herrmann et al. 2012.
Further analyses of the artificial knee joint using the HiL joint simulator are planned for the future, as well as an extension of the investigations to the shoulder joint following artificial joint replacement.