Robotik
Diese Seite gibt einen Überblick über die aktuellen Forschungsprojekte im Bereich Robotik.
HiL Gelenksimulator

In Deutschland wurden im Jahr 2015 laut Bundesamt für Statistik 227.293 Hüftgelenks- und 173.304 Kniegelenkserstimplantationen sowie 22.406 Erstimplantationen endroprothetischer Gelenke an der oberen Extremität (Schulter, Ellenbogen, Hand und Fingergelenk) durchgeführt. Dazu kamen 35.290 (Hüfte), 24.747 (Knie) und 3.666 (obere Extremität) Wechseloperationen nach einem endoprothetischen Gelenkersatz, sodass im Jahr 2015 bundesweit täglich mehr als 1.300 Operationen im Zusammenhang mit einem künstlichen Ersatz der aufgeführten Gelenke durchgeführt wurden.
Das NJR (National Joint Registry for England, Wales, Northern Ireland and the Isle of Man) führt in seinem Jahresbericht 2016 als Gründe für Wechseloperationen unter anderem die Instabilität des Gelenkes bis hin zur Luxation mit 13% (Hüfte), 19.2% (Knie) und 27% (Schulter), eine Fehlpositionierung der Implantatkomponenten 5.3% (Hüfte) und 7.4% (Knie), sowie einen eingeschränkten Bewegungsumfang beim künstlichen Kniegelenk mit 5.3% auf.
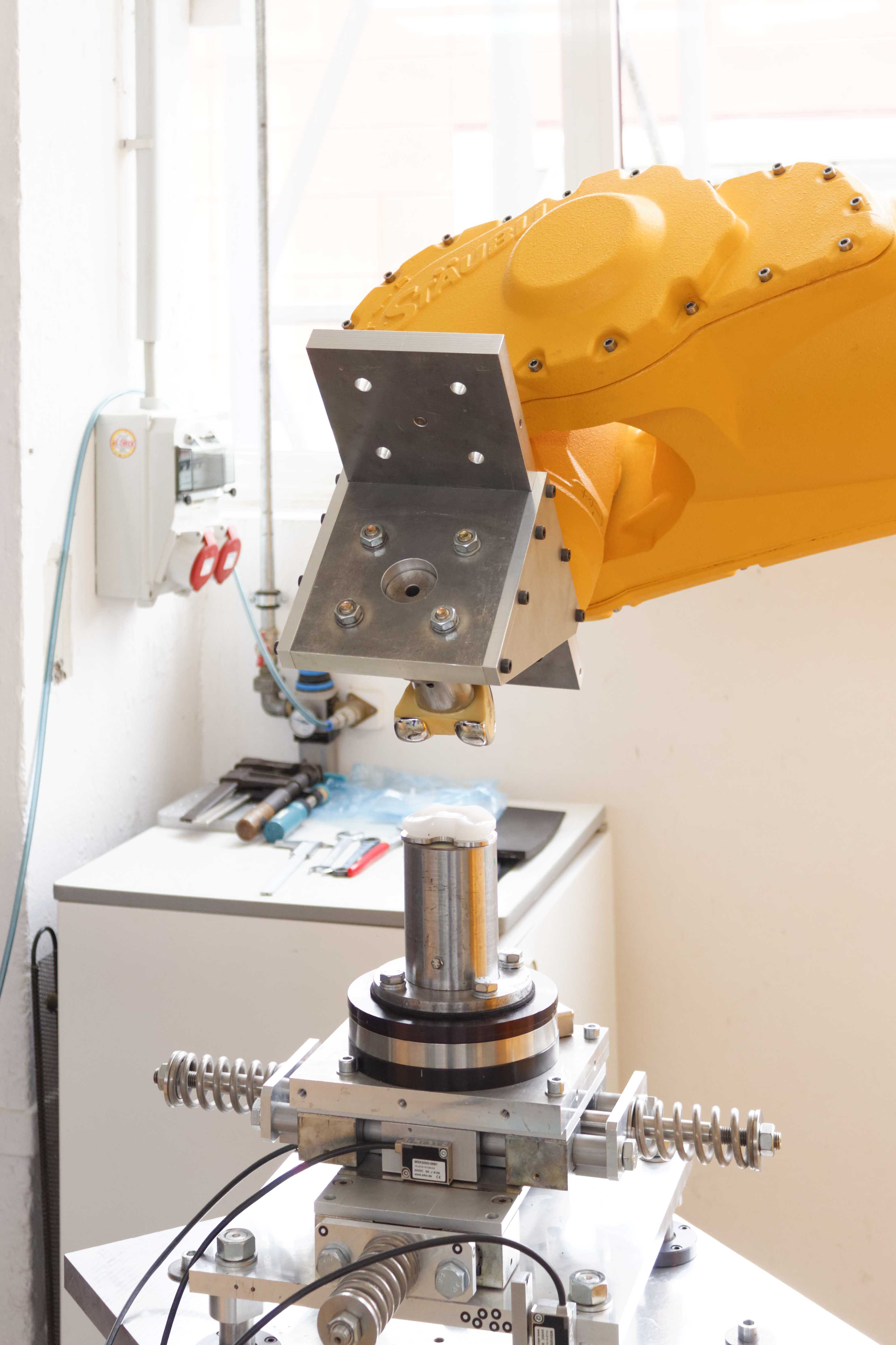
Um die Einflussfaktoren der Gelenkinstabilität, die Auswirkungen von Fehlpositionierungen und unterschiedliche Implantat-Designs auf die Gelenk-Kinematik unter realitätsnahen Bedingungen reproduzierbar und systematisch untersuchen zu können, hat der Lehrstuhl für Technische Mechanik/Dynamik in Zusammenarbeit mit dem FORBIOMIT (Forschungslabor für Biomechanik und Implantattechnologie der Universitätsmedizin Rostock) einen roboterbasierten Hardware-in-the-Loop (HiL) Gelenksimulator entwickelt.
Eine reale Endoprothese wird dabei durch einen Industrieroboter (Stäubli TX200), ausgestattet mit einem Kraft-Momenten-Sensor (ATI Omega 160), in Interaktion mit einem biomechanischen Simulationsmodell der anatomischen Umgebung des Gelenkes bewegt und belastet. Dafür werden die sechs räumlichen Freiheitsgrade des Gelenkes komplementär in freie und gesperrte Richtungen unterteilt. In der/den freien Richtung(en) wird die Endoprothese lagegeregelt und in den gesperrten Richtungen kraft-momentengeregelt durch den Roboter bewegt.
In mehreren Forschungsprojekten konnten mit diesem Gelenksimulator erfolgreich Untersuchungen für künstliche Hüft- sowie Knieendoprothesen durchgeführt werden. Ein Teil der Ergebnisse zu künstlichen Hüftgelenken sind zum Beispiel in Herrmann et al. 2015 sowie Geier et al. 2017 und zu künstlichen Kniegelenken zum Beispiel in Herrmann et al. 2012 publiziert.
Für die Zukunft sind mit dem HiL-Gelenksimulator weitere Analysen des künstlichen Kniegelenkes sowie eine Ausweitung der Untersuchungen auf das Schultergelenk nach künstlichem Gelenkersatz geplant.
In Kooperation mit