Ausstattung
Der Lehrstuhl Technische Mechanik/Dynamik verfügt über eine umfangreiche Ausstattung im Bereich Robotik. Neben einem Versuchsroboter gibt es zwei Knickarmroboter unterschiedlicher Größe der Firmen KUKA und Stäubli.
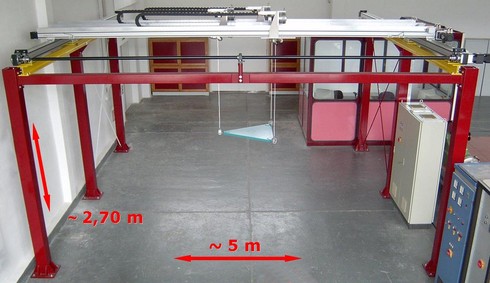
Darüber hinaus verfügt der Lehrstuhl über das seilgeführte Handhabungssystem CABLEV zum Testen verschiedener Regelungskonzepte.
Für die Vorlesung Fahrmechanik gibt es ein Versuchsfahrzeug vom Typ "Mercedes SLK" am Lehrstuhl, mit dem verschiedene Fahrversuche durchgeführt werden können.
Außerdem verfügen wir über folgende Ausstattung: